Success! 98,492 ft. !!
OLHZN-3 was the third high altitude weather balloon flight for Overlook Horizon High Altitude Balloons. The launch date for this flight was Saturday, May 28, 2016 at 5:59:59pm EDT (21:59:59 UTC). The goal of the third flight was to further solidify recovery methods and obtain photos and videos above 80,000 ft. in altitude. We successfully achieved a maximum altitude of 98,492 ft. and have HD photos and videos of the entire flight! In terms of tracking, though, this was almost Mission Impossible. Nearly everything that could’ve gone wrong before launch, did go wrong. The original planned launch was for 9:45am EDT (13:45 UTC). This launch was plagued with disasters. It started off smooth with an easy balloon filling and easy setup. Things started to go wrong about 10 minutes prior to launch when the tracker would not receive a GPS signal. After hours of testing, we theorize that the wiring above the GPS antenna was looped and creating a small electromagnetic field that was interfering with the ability for the GPS antenna to properly receive signal. Once we resolved this, we were able to obtain a signal. As we repackaged, though, we noticed that the broadcast would cut out after only 1 transmission. We noticed that the VIN pin on our Arduino was loose and may have been contacting another part of the board. We repaired this and prepped for launch, but the transmission issues remained. As we prepared for launch, after a 5 hour delay, the balloon burst while anchored to the ground which ended our first attempt.
Luckily, we were able to get another tank of helium and already had another balloon ready. We tested the payload and prepared for a 5:00pm EDT (21:00 UTC) launch. We prepared for the second attempt in record speed and had the balloon filled and payload ready to launch in only 45 minutes. However, as we were preparing to launch, our transmission issues returned. We suspected that maybe the loose VIN pin shorted the Arduino earlier and replaced the Arduino with a backup. We were receiving great transmissions and decided to launch. We received the last APRS transmission at only 1,728 ft., but continued to receive RTTY, although it was tough to decode. The APRS signal was never received by any receiver which made for a stressful wait. At this time, we have no idea why this occurred, because when we retrieved the payload, the tracker and data operated nearly flawlessly. The only item that did not operate was the APRS transmission format. This still needs to be investigated. We eventually lost the RTTY signal about 10 minutes into the flight and just waited. About 5 minutes before landing, we were waiting nearby the predicted landing site and almost ready to give up when we started receiving the RTTY signal again, but couldn’t decode it. The RTTY signal is a very unique signal with a very specific width, so we knew it was our balloon! Transmitting RTTY, but no APRS?! We have no idea why… After losing that signal again, we checked the backup tracking system and the balloon appeared at an altitude of 445 ft…. it landed!! The backup tracker located the balloon on the ground 3.16 miles from where we were waiting.
After opening the payload, we were able to receive all flight and sensor data as well as full HD footage from the entire flight – launch, flight and landing! It was a 10 out of 10 on the stress meter trying to get this flight to launch, but when we saw the photos and videos, we knew it was definitely worth it! We’ve already started making improvements to the launch procedure and the payload for the next flight.
Launch Video
Balloon Burst Video
Landing Video
In-Flight Photos :: 98,492 ft.














Data Collected
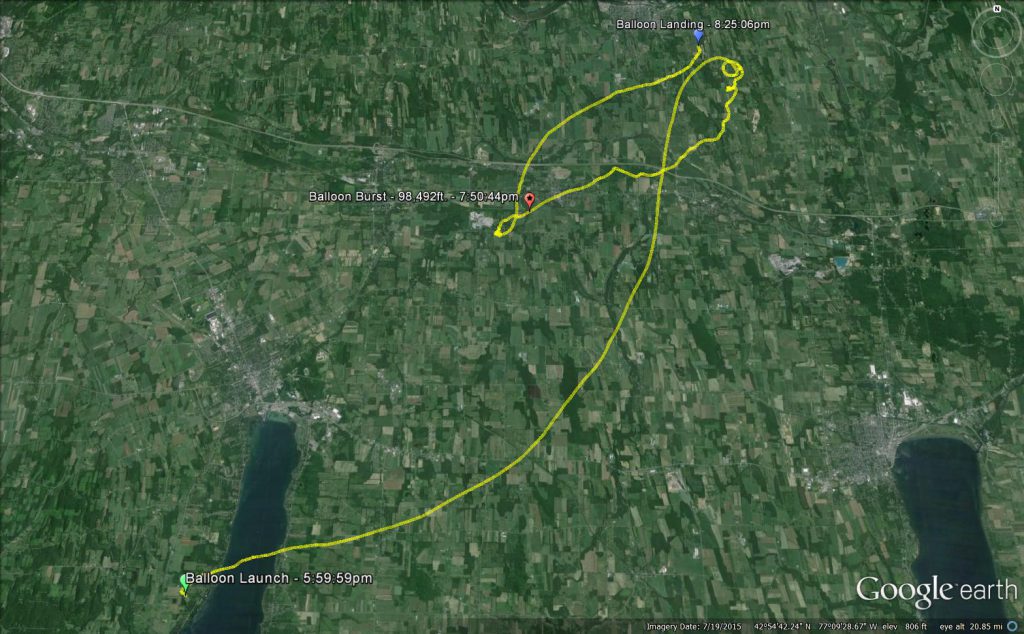
Actual Flight Path

Actual Flight Path in 3D
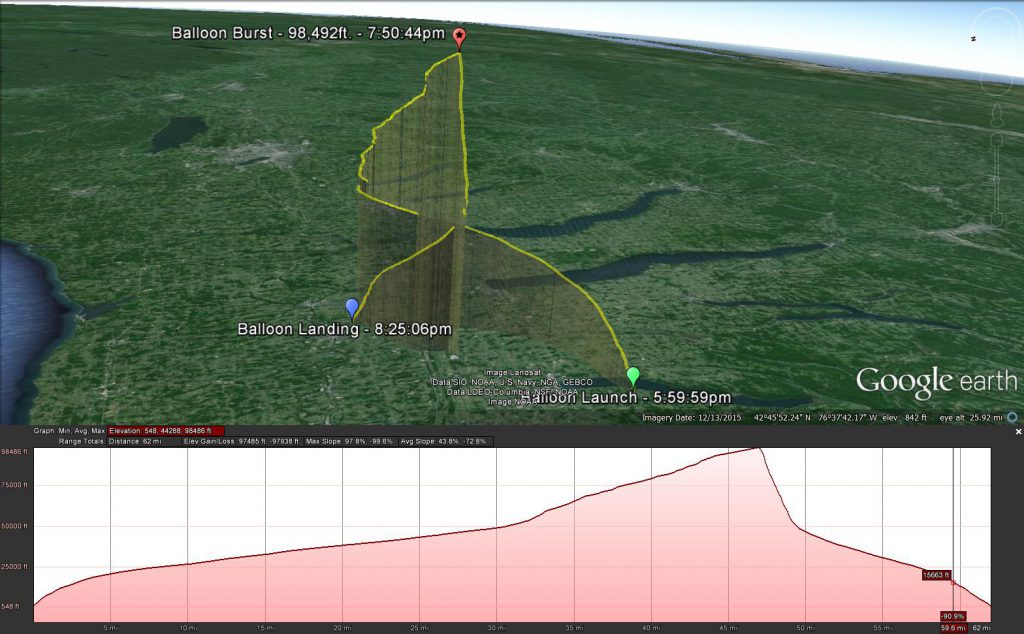
Actual Flight Path in 3D with Elevation Shown

The predicted (white) flight path shown compared to the actual (yellow) flight path.
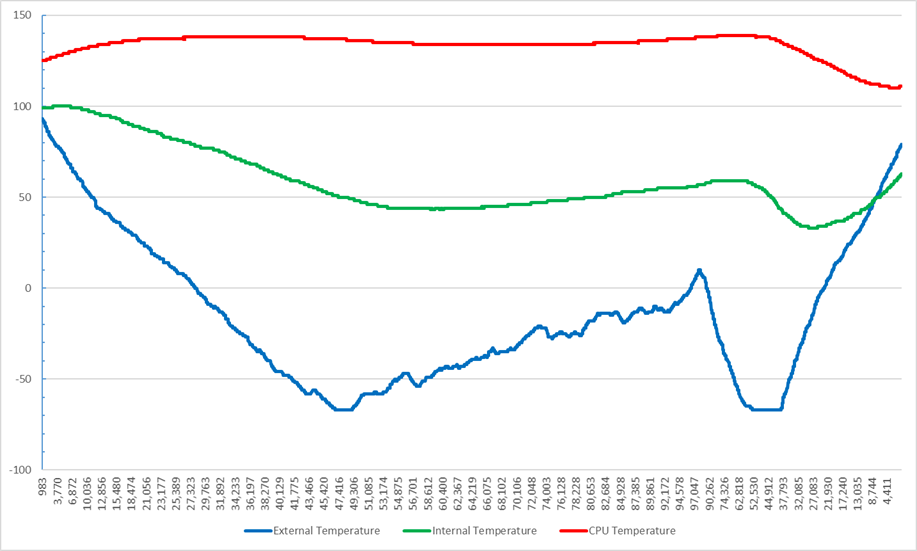
Temperatures recorded by altitude.
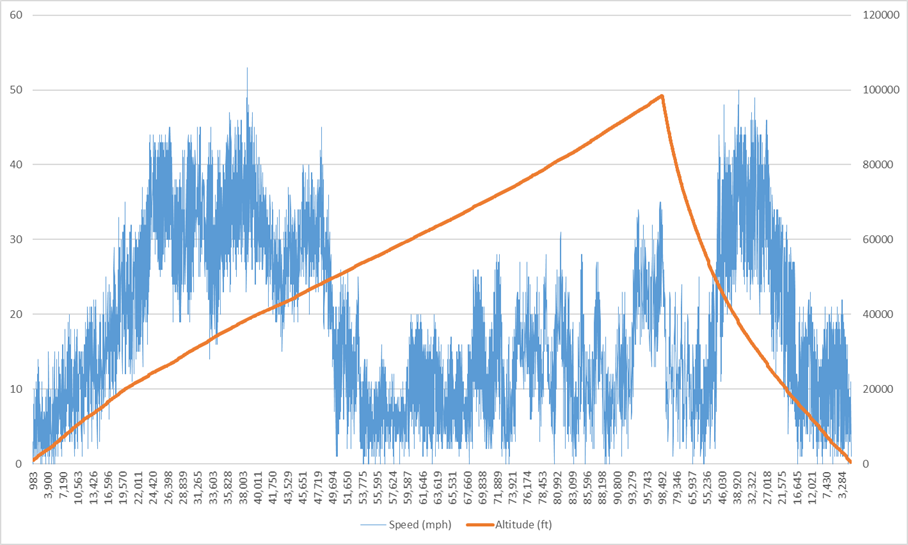
Speed (mph) recorded by altitude.
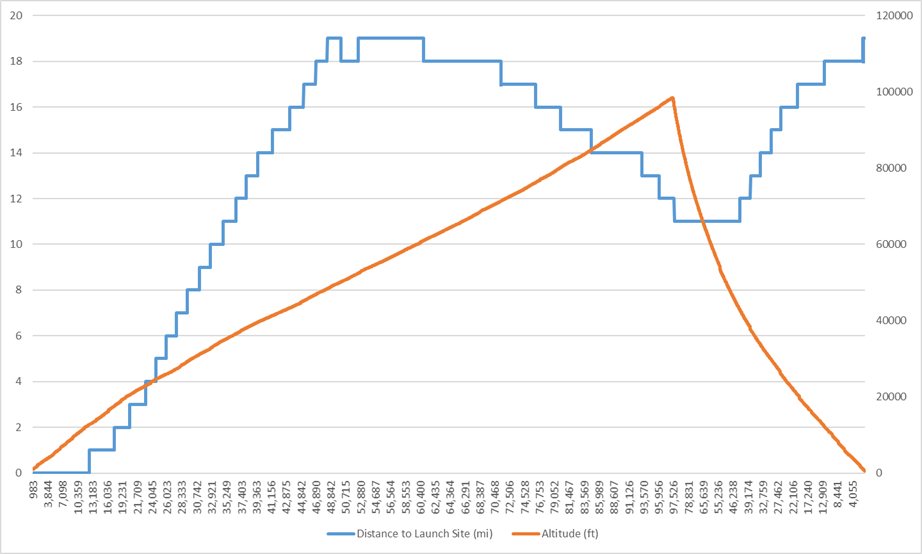
Distance from launch site by altitude.
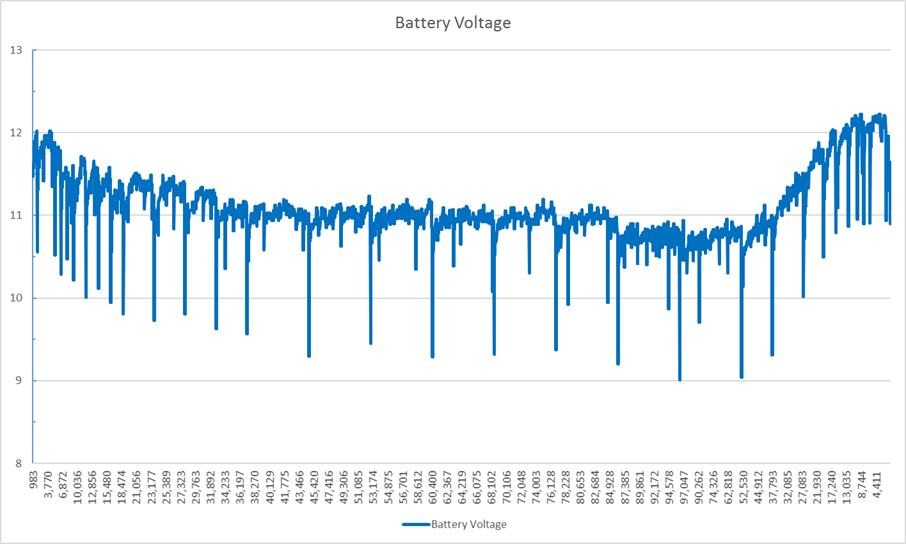
Main battery voltage by altitude.