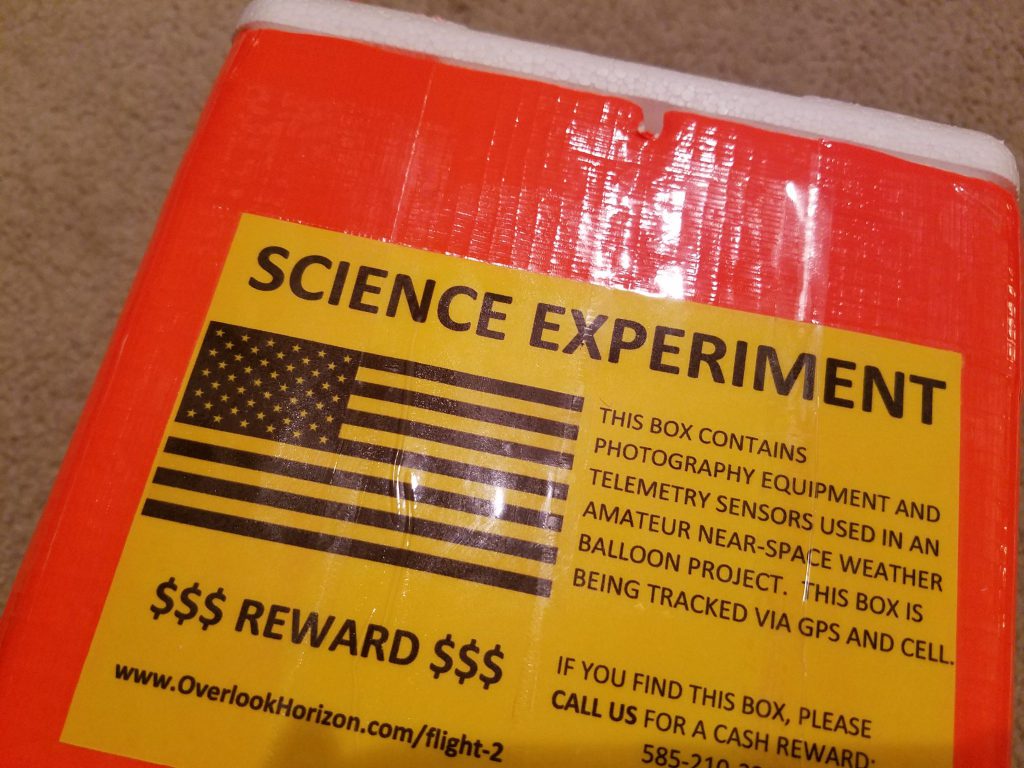
OLHZN-2 was the second high altitude weather balloon flight for Overlook Horizon High Altitude Balloons that launched on May 7, 2016 at 11:56am EDT (15:56 UTC). The goal of the second flight was to solidify recovery methods and ensure sensor accuracy throughout the entire flight. This was the first flight that was successfully recovered!!! Our first flight (OLHZN-1) had a few issues that were corrected for this flight. The major issue we needed to resolve was the successful recovery of the payload which was not accomplished in OLHZN-1 due to a insufficient battery pack for the flight. This flight used 8 Energizer Ultimate Lithium batteries that kept the flight fully powered throughout.
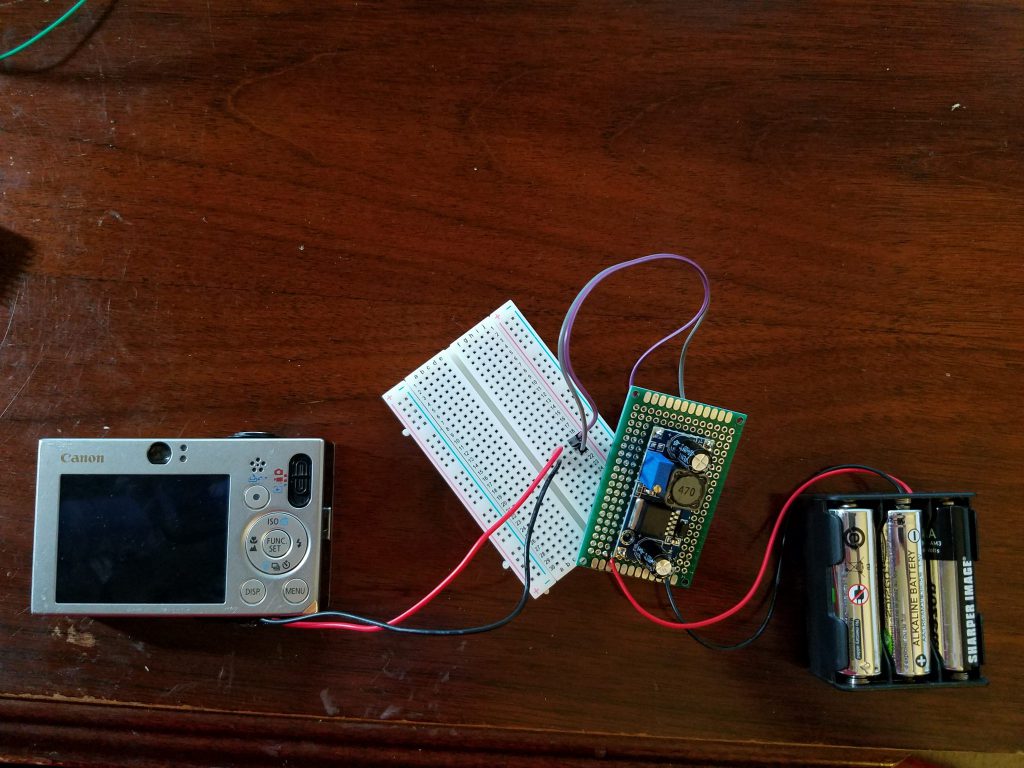
Although the flight is considered a success, it wasn’t without issues that need to be improved on for the next launch. The day started off on a good note and we hoped to have our launch procedures down to have a proper countdown for our live viewers. Despite arriving 2 hours early, we still ended up launching almost exactly an hour late… again. This time around, the delays were due to two items. First, we were battling some uncomfortable ground level winds that made filling the balloon stressful and difficult to control which meant the balloon filling procedure took almost 45 minutes alone. Second, while packing the payload for launch, we discovered a fault in the voltage regulator for the extended camera battery we added for this flight. The voltage regulator was supplying too many volts to the camera, which caused the camera’s SD card to fail. Fixing the voltage regulator would have been a time consuming task and our launch window was closing, so we elected to replace 3 out of 6 of our fully charged lithium AA’s with used Alkaline AA’s. The used alkalines we slightly depleted which meant they were outputting a lower voltage that the camera could work with. This worked, but also meant that the camera cut out early in the flight and only lasted to about 40,000 ft. during ascent before losing power.
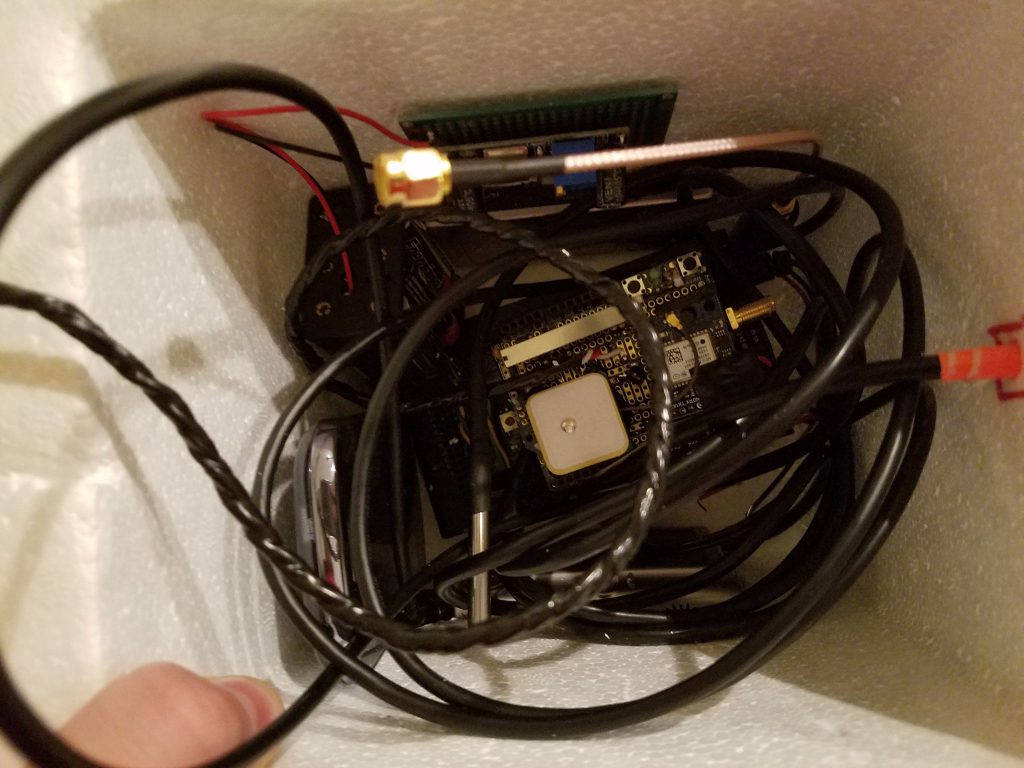
In addition to that, the launch itself was nearly a disaster due to the strong winds. At liftoff, a strong gust of wind pulled the balloon horizontal which caused the payload not to lift, briefly. The payload crashed into the ground and we heard one of the radio transmissions stop mid-transmission. This was a heartbreaking thought as we thought the flight was over before it was even 1 ft. off the ground. Luckily, the unit continued transmitting. We later discovered that the crash on liftoff caused the battery pack cover to dislodge and we can hear on the liftoff video when the Arduino reboots and goes through its power-up sequence as its lifting off. The Arduino would go on to power cycle (reboot) 14 times throughout the flight due to the batteries being loose with the dislodged cover. It’s amazing that it even kept transmitting.
The balloon traveled to a maximum altitude of 90,141 ft. before bursting at 1:58pm EDT (17:58 UTC). It then came down in a hurry – only 36 minutes! Our next issue occurred when the unit stopped transmitting on the descent at 14,973 ft. and never transmitted again for the final 11 minutes of the flight. We again discovered that this was also due to the aforementioned loose batteries. Of the 14 power cycles (reboots) that occurred during the flight, 11 of them occurred during the final 11 minutes of the flight. This rapid power-cycling meant that the Arduino could not transmit as the software was set to send the first transmission at the 90 second mark after power-up. Since it continuously power cycled, it never reached the 90 second mark.
Fortunately, the backup GPS tracker worked this time and the unit appeared on our GPS app seconds after landing. We were actually hoping to see it land as we were waiting nearly at the predicted landing site. Unfortunately, we missed it as it landed about 1 mile from where we were waiting, but we were pretty close! There’s always next time.

OLHZN-2 Photos
Sadly, our cameras did not last very long during the flight. The first camera was supposed to take still photos, but ended up recording nothing. The camera was accidentally switched from photo to video mode after it was powered on and while it was being packed into the payload just minutes before launch. This camera only had a 2GB SD card (it’s old, that’s all it supports) and was actually taking videos. The memory card quickly filled to capacity before liftoff even occurred. At the end of the live broadcast, I make mention of an unknown beeping sound. It turns out this was the camera providing a “memory card full” error every time it was being instructed to take a photo. The second camera worked well, but was the camera we were having difficulty with prior to launch. The high capacity and brand new batteries we used was providing too much voltage and the voltage regulator needed to be adjusted. Adjusting it would’ve been a longer delay and our launch window was closing. We opted instead to insert used batteries which slightly dropped the voltage enough for the camera to operate. Unfortunately, this meant the camera only lasted about 45 minutes into the flight (40,000 ft.) before losing power for good. Next time, we’ll have the full battery pack in use to get a longer battery life.


















OLHZN-2 Data Recovered
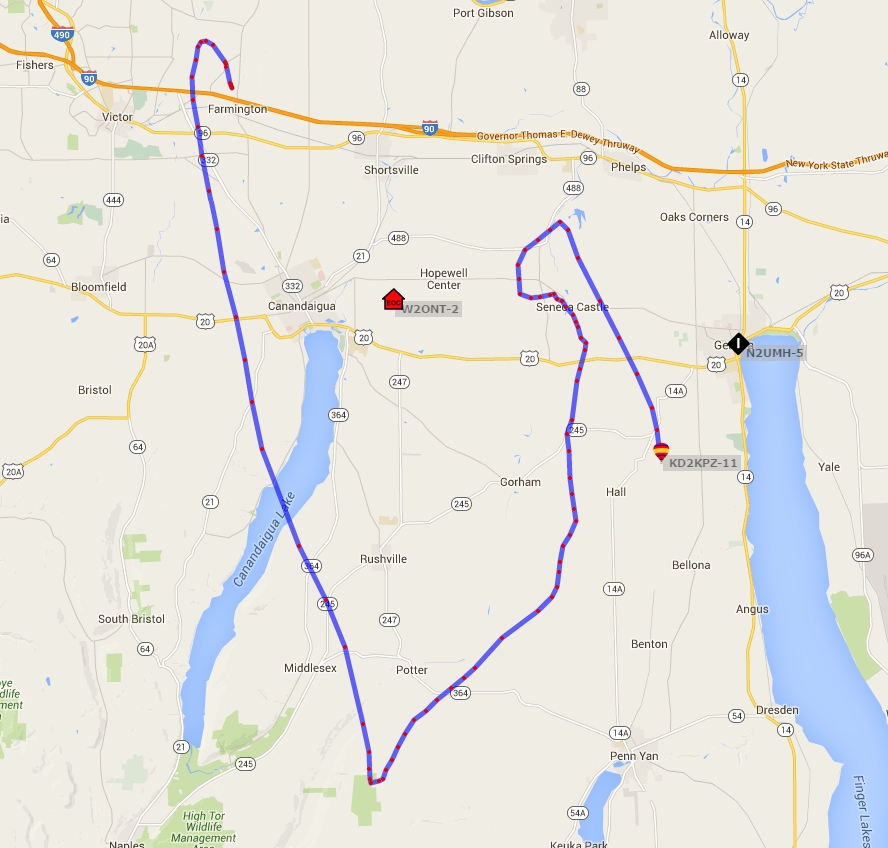
The flight path, not including the last 10 minutes.

The predicted flight path (orange), compared to the actual flight path. Difference mostly due to 1 hour launch delay.
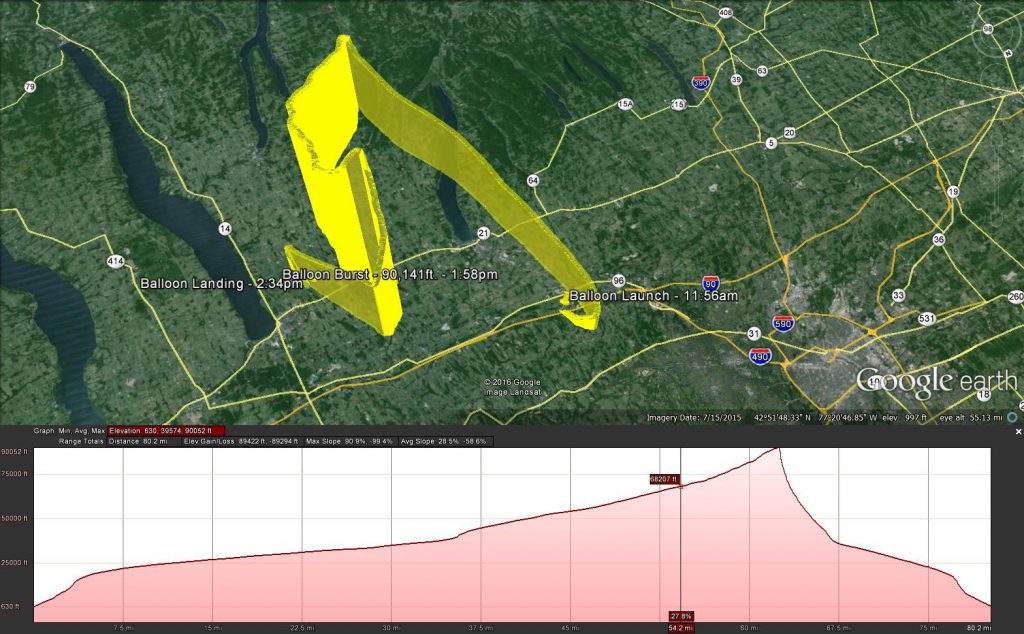
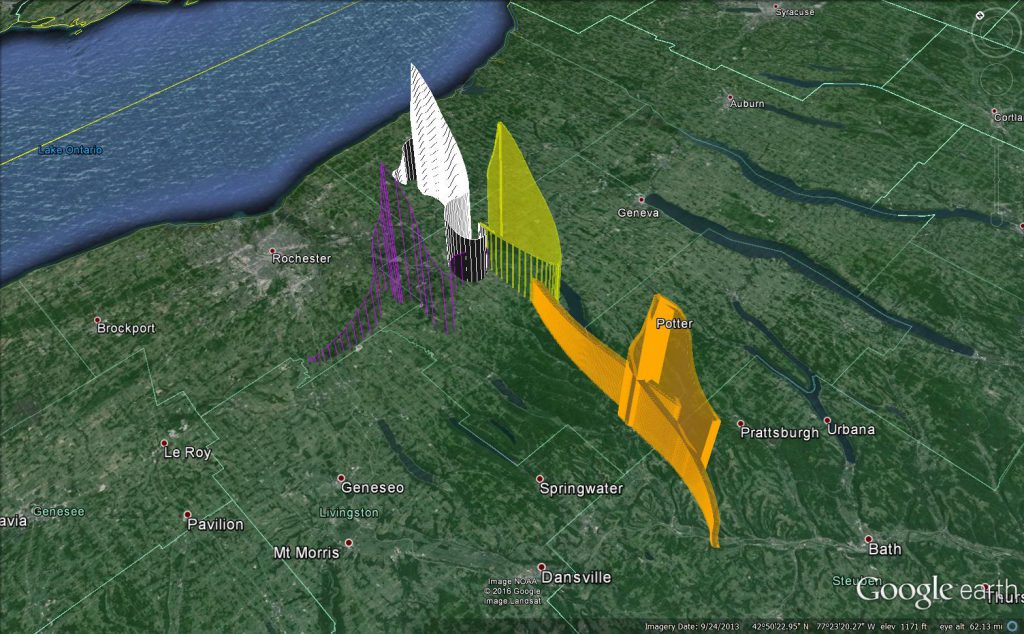
Actual flight path with elevation. Note: “up” is southwest to see the path better.
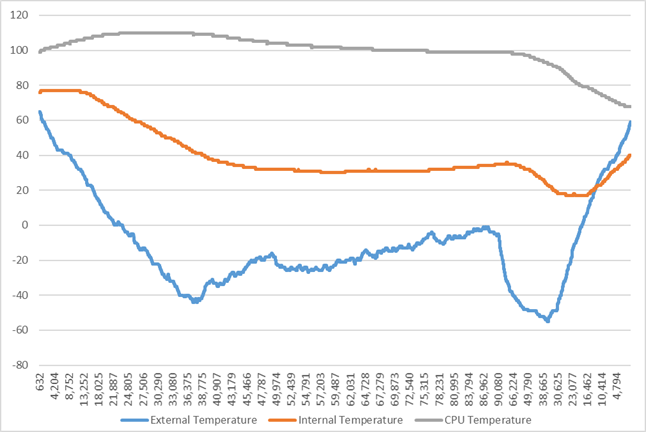
Temperature readings from our 3 sensors, by altitude.
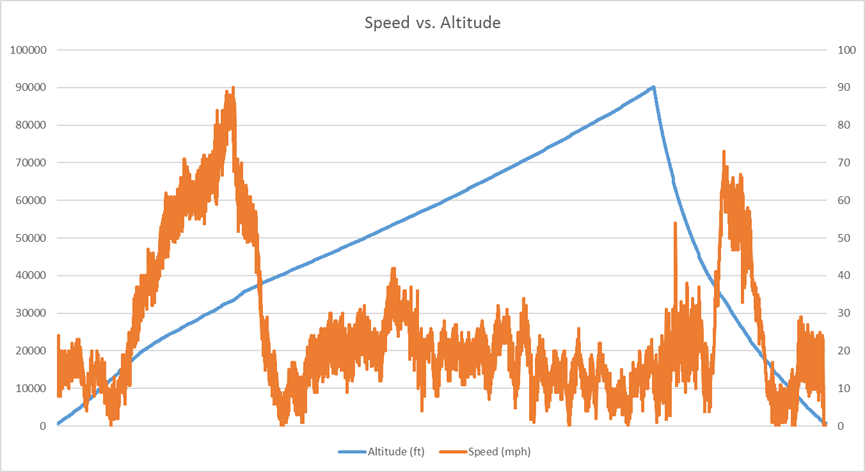
Speed reading by altitude.
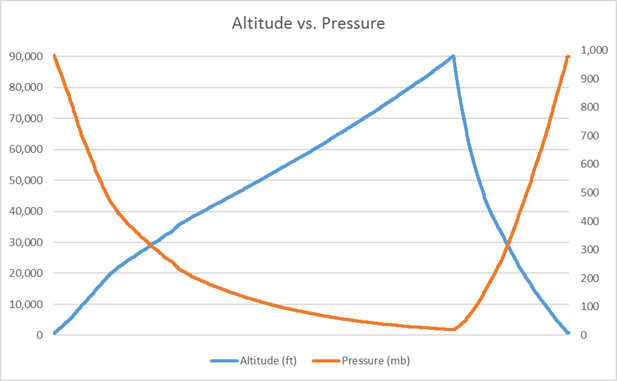
Pressure measurements by altitude.
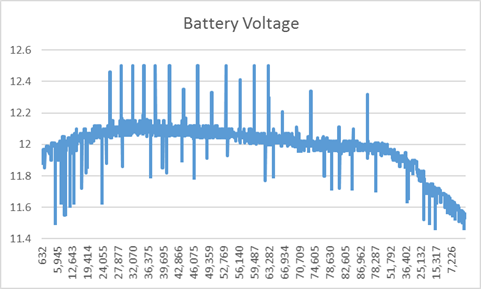
Main battery voltage readings. At least 7V necessary to sustain system.
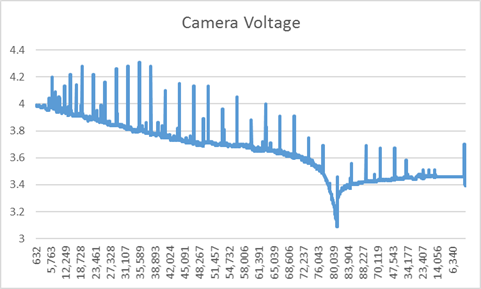
Camera battery voltage readings. 3.7V necessary to sustain camera.
Flight Predictions
OLHZN-2 flight was unique from a weather prediction standpoint. There are several prediction websites we use when determining what day to launch and where the balloon will potentially land. All the prediction websites use the same Global Forecast System (GFS) models when running simulations, so usually they all show about the same landing area, within a certain degree of uncertainty. This launch, however, seemed to be wildly inconsistent among the prediction websites, which is interesting to say the least. After running 4 different predictions on the same data, each simulator came up with a drastically different direction for the landing site. One of the simulators even predicted that the balloon would land only 1.6 miles from the launch site, which is crazy! This launch was particularly intriguing to see where the weather really would take us and because this launch stayed relatively close to the launch site which made for an easier recovery.
Initial predictions with 4 wildly different possible landings.

Prediction #1 from CUSF had us landing somewhere in the Penn Yan area. This prediction’s flight path shape seemed to be the most accurate to the actual flight path. Our launch time was delayed by an hour, so it’s tough to say for sure, but the actual flight path most closely resembled this.
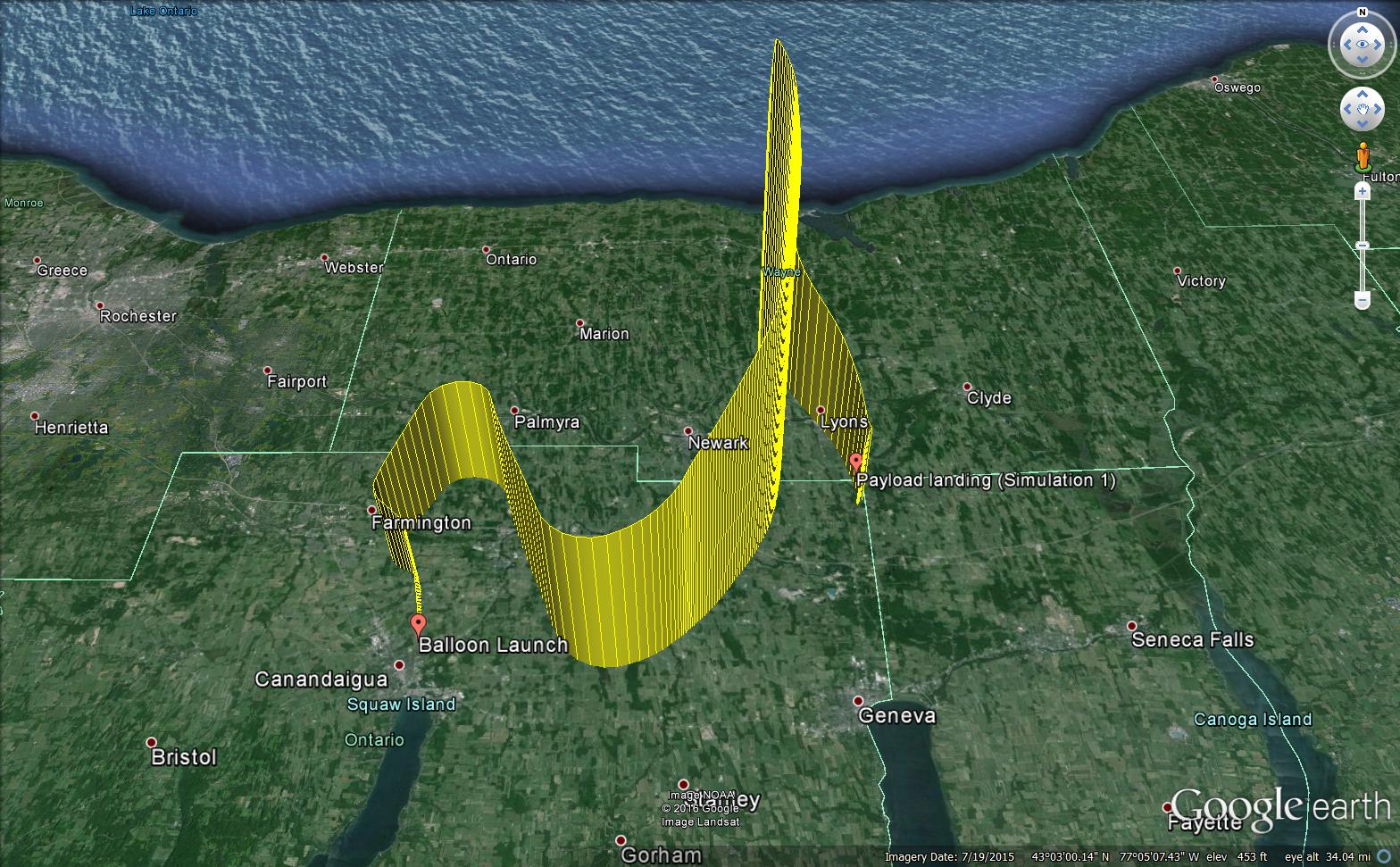
Prediction #2 from Astra-Planner had us landing somewhere in the Lyons area. This predictor has a nice feature for the ability to load sounding files (observed winds) just prior to launch, but the winds were so strange for this launch that even with actual observed windows, the predictor couldn’t get a consistent path.
Flight Videos
Here’s the full length of video capture we received as well as 2 highlights from airplane flybys during flight. Videos were recorded in 5 minute increments and then merged together post-flight. After each recording session, there was about 3 to 5 seconds of no recording while the camera saved the previous footage so occasionally the footage will jump. The telemetry overlays were added post-flight with the software DashWare. There were two nearby planes that passed the balloon in flight. Once occurred at about 22,500 ft. and 21:24 into the full-length video, the other occurred around 37,400 ft. and 42:00 into the full-length video. The camera batteries died around 43,000 ft. which was less than halfway to our 90,141 ft. maximum altitude achieved.
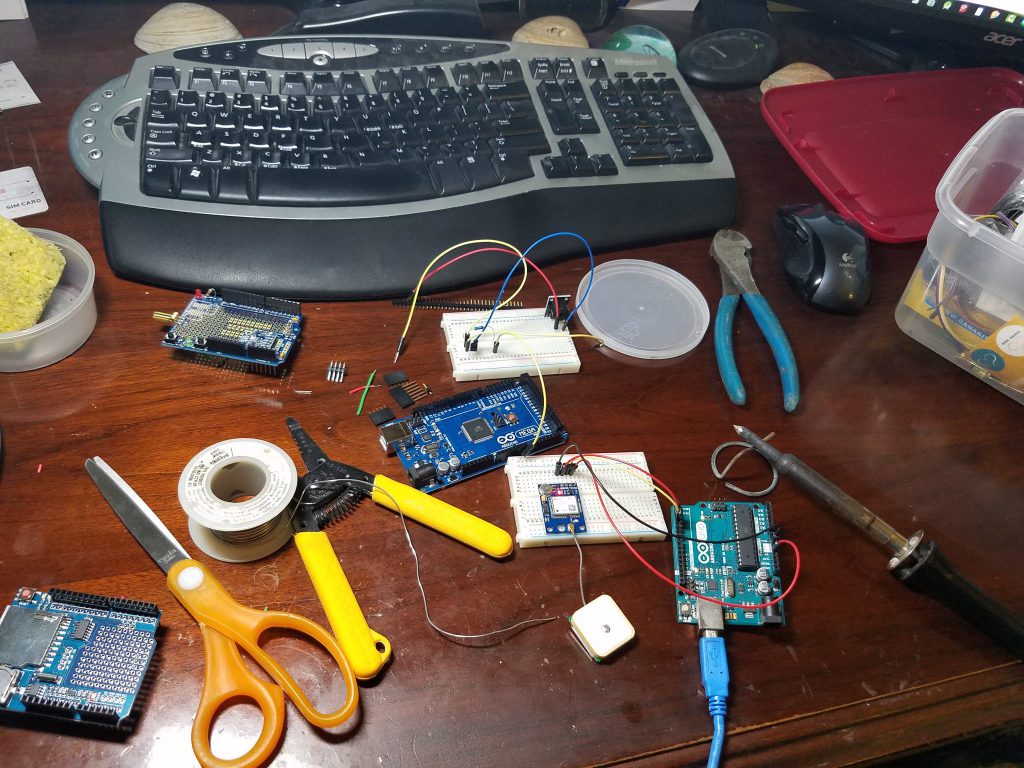
Technical Specifications
