OLHZN-11 was the eleventh high altitude weather balloon flight for Overlook Horizon High Altitude Balloons. This flight occurred on April 29, 2018 at 3:01pm EDT (19:01 UTC). The focus of this flight was to test our updated large radio tracking systems to ensure that our repairs we made after last year’s flights are performing as expected. This flight also used two Lightdow LD4000 Cameras facing outwards on both sides of the payload. Additionally, this flight had our new micro-payload that was originally flown on OLHZN-10 which was used as a third backup tracking method on this flight to further test performance of the micro-payload.
Major changes to the 2018 flight computer:
- Watchdog timer added to automatically reboot the flight computer if an anomaly occurs
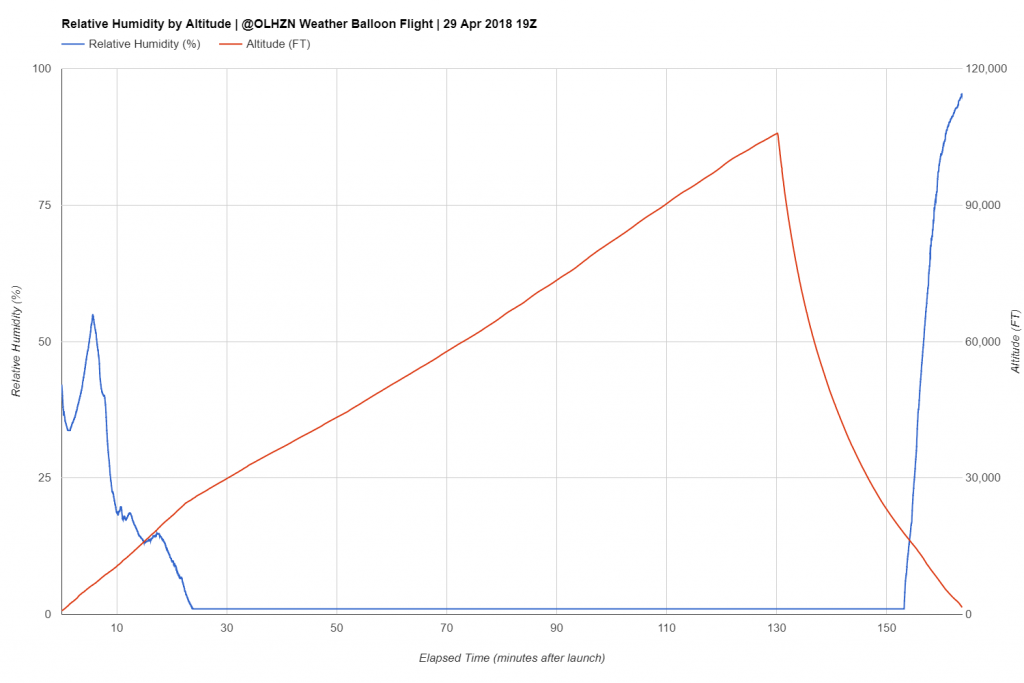
- Humidity sensor added to generate post-flight weather soundings
- Capacitors added permanently to the circuit design. These were added in a temporary manner previously on OLHZN-8 and OLHZN-9.
- Software updated for optimizations in performance and reliability.
Flight Day Story
This started out looking to be a terrible day for weather balloon flying, but turned out to be a great success! The morning started out cold, cloudy & windy with a mixture of rain & snow in the air. Fortunately, we found a new launch location that was well shielded from the higher surface winds which made inflating the balloon very tolerable. Balloon filling proceeded on schedule along with all our startup procedures. We experienced a slight delay around the T- 2 minutes time period as the local FAA TRACON center was unable to locate our flight information we had filed days earlier. We were able to quickly forward them a copy of the information, but ended up launching 98 seconds late, which is not bad, but unsatisfying since we aim to always launch at exactly T-0.
The flight itself proceeded nearly perfectly. Our main onboard computer operated flawlessly throughout the entire flight and provided flawless positioning reports throughout the entire flight. Our secondary micro-payload that we introduced on OLHZN-10, however, experienced the exact same failure that was experienced on OLHZN-10. Fortunately, this was just a secondary system so it did not impact flight operations and in reality, this was actually exciting since we were able to finally verify the exact cause of the OLHZN-10 failure. Shortly after the balloon burst event, we discovered (and captured on video) the radio antenna for the micro-payload detached from the payload due to the extremely cold temperatures and the extreme oscillations that are commonly experienced during the descent phase. This antenna was simply built from a piece of 22 AWG solid core wire which proved to be too rigid in the cold temperatures. Our next flight for OLHZN-12, will make use of .33mm guitar wire instead which is more flexible and should hopefully provide better tolerance to the oscillations.
The landing for this flight occurred in Moravia, NY which was 7.40 miles northeast of our predicted landing location which is well within our expected margin of error for our landing locations. We usually try to keep the uncertainty to within 10 miles, but anything under 15 miles is still acceptable. A prediction under 5 miles is fantastic! The payload concluded its flight at the top of a 75 ft. tall ash tree which the parachute snagged on “landing”. We made several attempts to launch a piece of string over the branch to try to bring down the payload, but were unsuccessful. The extremely generous landowner then offered to cutdown the offending tree (which he plans to use for firewood) with his chainsaw. He was very successful at that and as the tree came down, the payload train line snapped (expected) and the payload freefell the remaining 75 ft. and made a hard, but successful landing. All the equipment remained undamaged, including the external micro-payload that had a direct impact with the ground on landing. Overall this was a very successful flight and leaves us extremely positive for the rest of our upcoming 2018 flights!




Collected Data
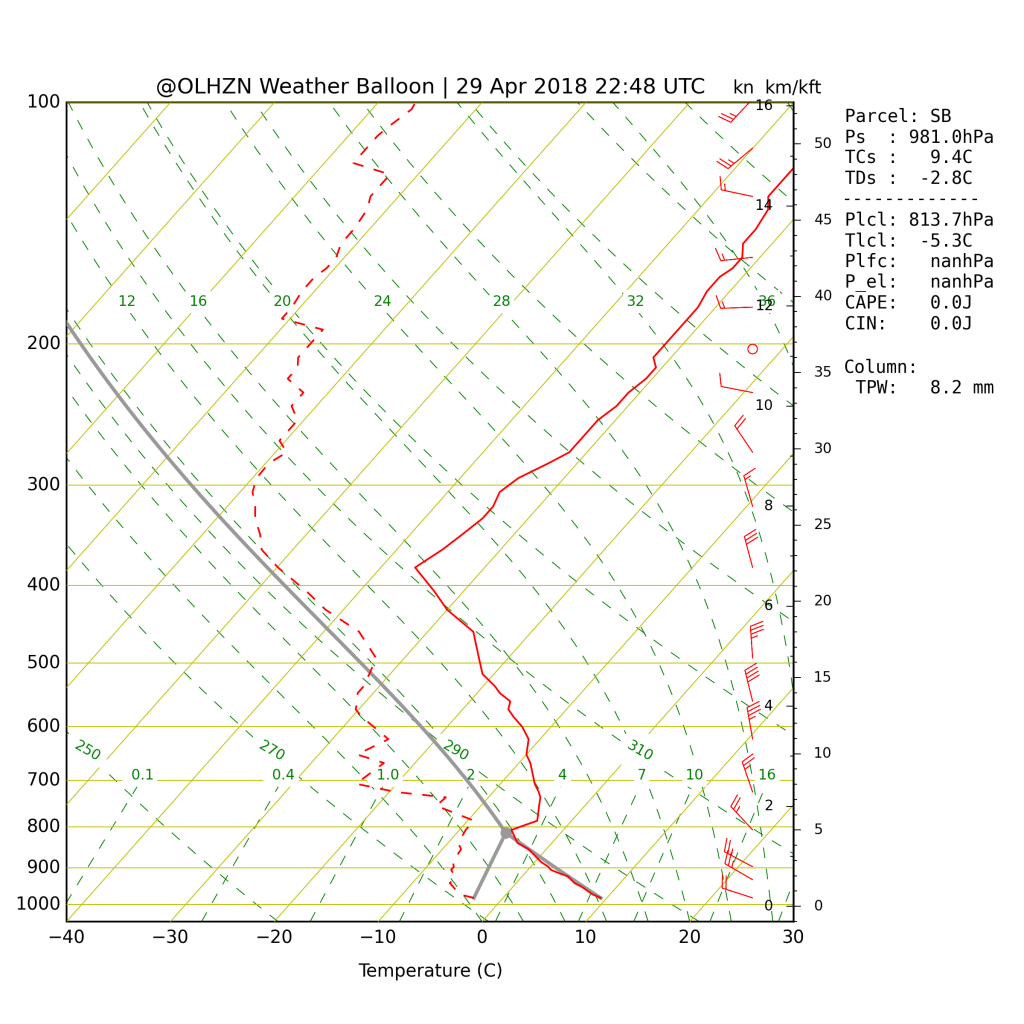
Sounding File #1
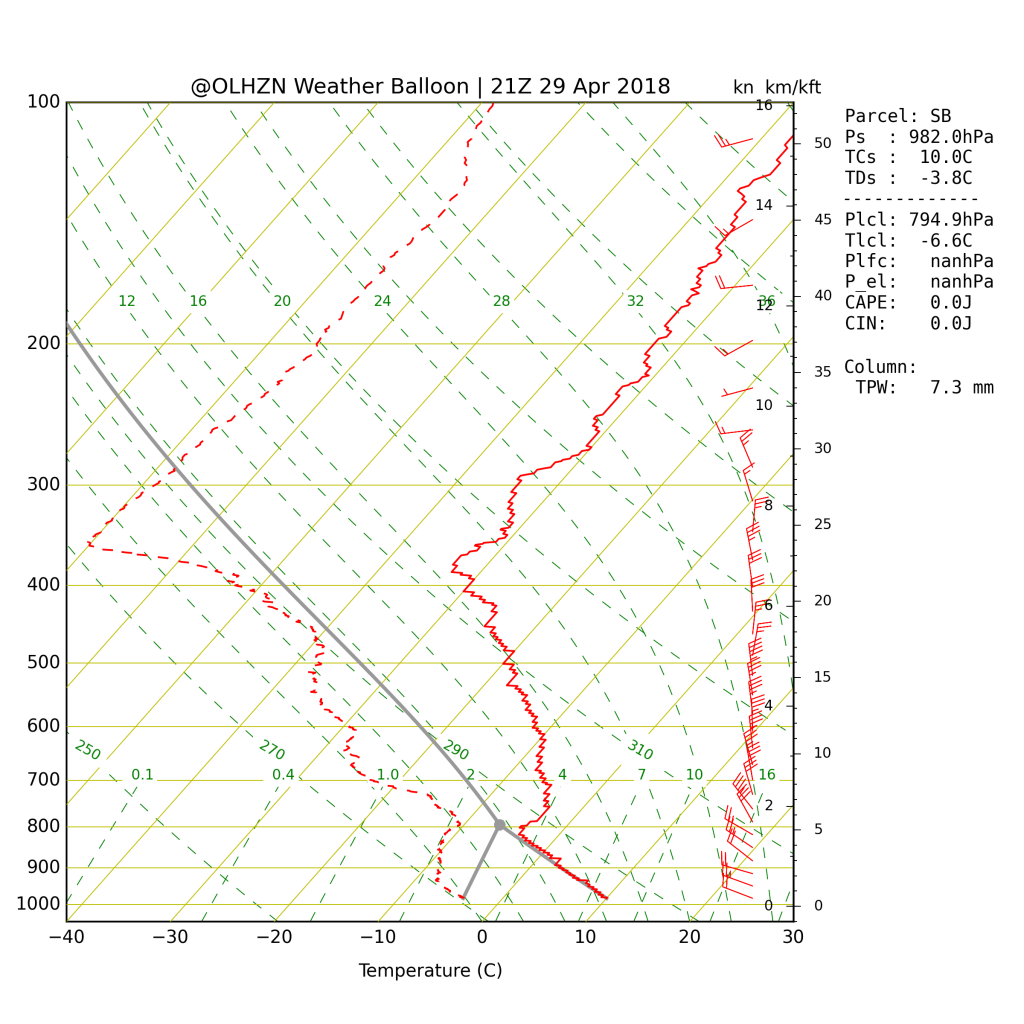
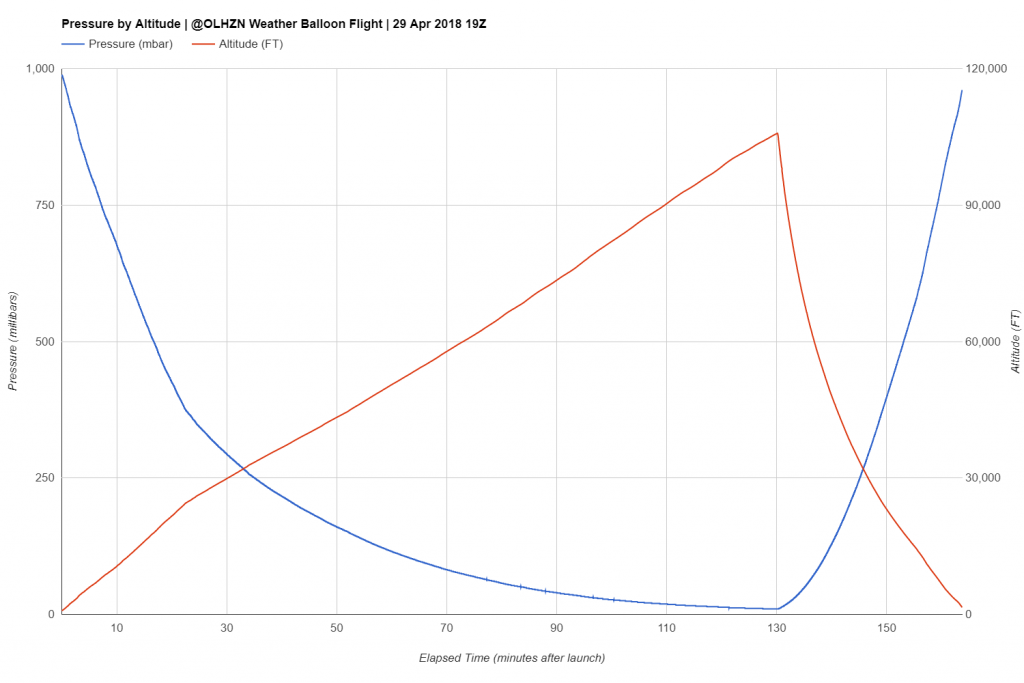
This Skew-T graph was generated from our main on-board flight computer that measures atmospheric conditions in 1 second increments. The raw data and raw sounding file for this Skew-T graph can be viewed here.
Sounding File #2
This Skew-T graph was generated from our secondary on-board micro flight computer that measures atmospheric conditions in approximately 60 second increments. The raw data and raw sounding file for this Skew-T graph can be viewed here. This temperature sensor appears to be more affected by solar radiation and reads abnormally high at the peak of its journey.
3D Flight Path Fly-Through
This is a 3D fly-through generated using the actual on-board data recorded during this flight. Time and positioning is all to scale. Feel free to scroll through or play with the controls to see how the flight profile looks!
Actual vs Predicted Fight Path
This map shows the actual (pink) flight path vs. the predicted (red) flight path. The structure for this flight followed closely to our predictions, but the first turn to the east occurred further north than expected resulting in our landing site being about 7.5 miles northeast of the predicted location which is still within the “normal” margin of error for our flight predictions.
Technical Specifications
Buy a Shirt & Keep Us Flying!
